



山东威力500吨二合一辅助动力控制器液压机反馈控制系统误差问题
由于许多原因,山东威力500吨二合一辅助动力控制器液压机反馈控制(也称为闭环控制)正变得越来越流行。首先,该技术已经历了大约150年的发展和高度的理解和广泛的吸引力。但液压应用工程师和技术人员最重要的发展是电液技术的广泛接受 - 通过使用电子设备控制山东威力500吨二合一辅助动力控制器液压机。随着我们行业中越来越多的人接受其优势,未来将会出现更多的反馈控制。
在反馈控制中,某个机器的输出(有时称为控制系统行话中的工厂)由传感器测量,发送回控制器(这是术语反馈起作用的地方),并与命令信号进行比较(也是称为输入信号或设定点)。比较包括从命令中减去反馈信号,其结果是误差或误差信号。
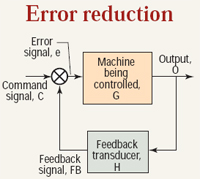
图1中的命令信号表示我们想要输出的位置。反馈信号直接衡量输出的实际位置。因此,差异是错误。它衡量命令和反馈不同的数量。数学:
e = C - FB
这种方案也称为负反馈控制,因为反馈信号“负反馈”。被控制的机器,图1中的G模块,被称为误差驱动,因为它实际上是由误差信号驱动的。我们必须仔细研究错误信号,因为许多想要更多地利用反馈控制来获取其益处的人会误解错误信号。
反馈控制的目的是让我们可以发送命令信号的机器,并使该机器的输出遵循命令。图1中的系统代表了一种显示实现该目标的最佳可能性的方案。
一个常见的误解
山东威力500吨二合一辅助动力控制器液压机电动液压运动控制,以其最关键和最有用的形式,充分利用反馈控制 - 特别是在无处不在的位置伺服机构中。然而,闭环控制的一个常见解释是“由于机器周围存在反馈控制,并且机器由误差信号驱动,控制系统会自动作出反应,使误差最终变为零。”确实如此,如果只有它是真的,那就非常偶然。但事实并非如此。
一个半世纪的现代发展寻求这一目标,但是,唉,它从未实现过。实际上,可以肯定地说,在任何真实的山东威力500吨二合一辅助动力控制器液压机反馈控制系统中,误差永远不会变为零,除非是稍纵即逝的时刻。
但是让我们通过观察两个山东威力500吨二合一辅助动力控制器液压机电液系统并将它们进行比较来回顾原理,看看如何处理错误。然后,我们将看到我们可以应对它们的含义和方法。
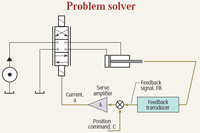
第一个系统是山东威力500吨二合一辅助动力控制器液压机电液位置伺服机构,如图2中的简化示意图所示。注意从气缸杆到反馈传感器的线路。它是一个坚固的机械联动装置,表示反馈传感器正在测量气缸杆的实际位置。
换能器可以是线性可变差动变压器(LVDT),电位计或常用的磁致伸缩型。现在唯一重要的一点是,它产生的信号可以直接衡量实际的活塞杆位置。输出(反馈信号)是与活塞位置成比例的电压。例如,输出可以是例如0V,活塞缩回,例如,当完全伸展时,输出为10V。反馈传感器的增益系数以V / in。,V / mm等测量。这意味着如果我们知道电压,我们就可以推断出气缸的位置。反馈信号被送入比较器 - 这是X内部的小圆圈。
比较器
的作用比较器执行数学函数,从位置命令信号中减去反馈信号,该信号被馈送到比较器的另一个输入端。比较器的输出是误差信号,直接进入放大器。放大器的功能是将误差电压提升到更高的值,同时将误差电压信号转换为误差电流。误差电压可能只有几毫伏。但是,山东威力500吨二合一辅助动力控制器液压机伺服或比例阀可能需要伏特和安培。放大器将提供增强。同时,放大的误差信号(图2中标记为电流)被馈入伺服或比例阀。
以下是简化形式的系统解释:假设位置指令电压和反馈电压完全相同。这要求误差电压为零。如果误差电压为零,则放大器输出电流为零。如果流入比例/伺服阀的电流为零,则其阀芯将居中,活塞杆将不会移动。
另一方面,如果指令电压升高,例如1 V,并且气缸尚未移动,则命令和反馈将不相等,误差将不为零,并且阀门的电流将不会零。阀门的阀芯将偏离中心(零),将流体引导至气缸,气缸将移动。
这引出了一个问题,“活塞将移动多远?”我们可以概括地回答这个问题。假设山东威力500吨二合一辅助动力控制器液压机液压管道与电流的代数符号(正或负)一致,则气缸将沿增加反馈传感器输出电压的方向移动。随着气缸移动,可能延伸,反馈传感器输出增加。当它增加1 V时,命令和反馈电压将再次相等。阀门电流为零,阀芯居中,气缸停止。
静止和相等
在这种情况下的关键观察是当气缸停止时命令和反馈相等。现在考虑一组简单的值作为示例。假设一个气缸的行程为10.000英寸。与此相关的是位置传感器,每英寸活塞行程产生1.000 V输出,0.000-v位置与完全缩回一致。如果我们输入3.725 V的指令电压,当气缸最终停止移动时,气缸的位置是多少?如果你回答了3.725英寸,你就是对的。然而,这是一个理想化和过于简化的解释。
在实际系统中,电压不会相等,因为气缸由于活塞上的力不平衡而停止 - 活塞帽端的面积大于杆端的面积。阀门的压力增益特性决定了确切的停止条件。压力增益及其与非对称气缸的相互作用超出了本讨论的范围,在任何精密运动控制系统中都必须考虑到它们。
但是,为了简洁起见,我们将继续使用过于简化的方案。所以现在考虑所描述的系统将产生一个反馈信号,该信号在汽缸停止时名义上等于命令。名义上,在稳定状态下错误为零,这是一种令人愉快的事态。它是一个零误差系统,在稳定状态下命令和反馈相等。如果它们不相等,则阀门移动并且气缸移动。
指令电压所需的范围与反馈传感器的范围完全相同。但这引出了另一个问题:“是否存在反馈控制系统,其中命令和反馈信号在稳态下不相等,即使在所谓的名义基础上?”答案是肯定的!
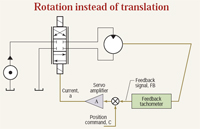
考虑图3的山东威力500吨二合一辅助动力控制器液压机电机速度控制回路。我们有一个伺服或比例阀,一个伺服或比例放大器,以及一个恒压功率单元。这与位置伺服机构的情况一样。然而,输出致动器是连续旋转马达,反馈传感器是旋转转速计。该电路是速度控制回路。
考虑一个数值例子。假设我们有一个转速计,其增益系数为每1000转每分钟1伏。这意味着如果电机以3000转/分的转速转动转速表,我们可以预期转速表输出为3.000 V.现在,以3000转/分钟运转电机所需的指令电压值是多少?如果你回答3.000 V,你就错了。这将需要更多,因为在该系统中必须存在严重错误,以使电机均匀地以任何速度旋转。换句话说,3.000V的命令将产生基本上小于3000rpm的速度。此外,我们没有足够的信息来计算所需的电压或产生的速度!我们需要知道伺服放大器的增益,单位为安培/伏特,阀门的增益,单位为每分钟gpm,
你必须知道收益
找到这些值是一项繁琐的工作,我们将回到它们,至少以简化的形式。同时,考虑刚刚提出的陈述背后的逻辑。假设我们输入了3.000 V的命令,然后认为速度是3000 rpm。这意味着转速计输出电压必须为3.000 V.这反过来要求误差电压为0 V.但如果误差电压为零,则放大器输出电流必须为零,然后阀芯必须居中。因此,电机必须以0 rpm转动!
但我们开始假设它转速为3000转,当我们跟着循环时,我们得出结论它必须零速!当零等于3000时,我们的假设是正确的。但是,唉,零不等于3000,除非是政治家手中。
在山东威力500吨二合一辅助动力控制器液压机速度控制回路中实际发生的是,例如,使用3.000 V的命令信号,电机的实际速度将介于0到3000 rpm之间,并且控制回路将找到一个均衡点,其中误差电压产生恰好足够的电流,使阀门移动恰当的量,以便产生足够的流量到电机,以保持电机以一定的速度转动。它不会为零,也不会是3000转。它将是介于两者之间的一些价值,并且控制循环找到最佳点,很少或没有麻烦。我们目前的问题是我们无法确定速度是多少,因为我们不知道电液部件的收益。
回到命令电压
现在我们将看看确定实际的命令电压,但有更完整的信息。问题将以这种方式提出:“如果电机必须以3000转/分转速,如果山东威力500吨二合一辅助动力控制器液压机电液系统的速度增益为30,000转/ 分,那么命令信号必须是什么?”
速度增益是一个组合增益,包括放大器,阀门和电机。它还必须在某种程度上包括动力单元压力和电动机上的负载转矩。这是一个非常方便的价值,但它绝不会减轻从那些几个组成部分的机器零件中找到它的乏味。经验只是说,如果我们要知道所有这些参数,组合速度增益的值为30,000 rpm / v是合理的。问题在图4中设置。
这样看:如果我们希望电机以3000 rpm转动,放大器输入必须小30,000或0.100 V.放大器输入是误差电压,因此指令电压必须比反馈大0.100 V 。当然,在3000转/分时,反馈电压必须为3.000 V.因此,我们得出结论,产生3000转/分的输出需要3.100 V的命令。
山东威力500吨二合一辅助动力控制器液压机分离位置伺服和速度控制回路的基本控制系统原理是双重的:首先,电子控制模块(放大器)是一个简单的比例控制。它本身不能将速度环中的误差减小到零。其次,我们在位置环中使用位置传感器,在速度环中使用速度传感器。位置传感器在回路中有一个集成,而速度传感器则没有,并且它是在稳态下将标称误差驱动为零的积分器。
速度环中没有积分器,它带来了另一个重要的控制系统原理:如果PID放大器(PID控制器,或者更简单地说,积分控制)是速度环,则标称稳态误差为零。用过的。这样的移动会在循环中放置一个人工积分器,当然,名义上说,3.000 V的命令将产生3000 rpm和零误差。
在反馈控制中,某个机器的输出(有时称为控制系统行话中的工厂)由传感器测量,发送回控制器(这是术语反馈起作用的地方),并与命令信号进行比较(也是称为输入信号或设定点)。比较包括从命令中减去反馈信号,其结果是误差或误差信号。
图1.反馈控制系统检测其自身的输出,生成错误信号,然后用于减少错误。
图1中的命令信号表示我们想要输出的位置。反馈信号直接衡量输出的实际位置。因此,差异是错误。它衡量命令和反馈不同的数量。数学:
e = C - FB
这种方案也称为负反馈控制,因为反馈信号“负反馈”。被控制的机器,图1中的G模块,被称为误差驱动,因为它实际上是由误差信号驱动的。我们必须仔细研究错误信号,因为许多想要更多地利用反馈控制来获取其益处的人会误解错误信号。
反馈控制的目的是让我们可以发送命令信号的机器,并使该机器的输出遵循命令。图1中的系统代表了一种显示实现该目标的最佳可能性的方案。
一个常见的误解
山东威力500吨二合一辅助动力控制器液压机电动液压运动控制,以其最关键和最有用的形式,充分利用反馈控制 - 特别是在无处不在的位置伺服机构中。然而,闭环控制的一个常见解释是“由于机器周围存在反馈控制,并且机器由误差信号驱动,控制系统会自动作出反应,使误差最终变为零。”确实如此,如果只有它是真的,那就非常偶然。但事实并非如此。
一个半世纪的现代发展寻求这一目标,但是,唉,它从未实现过。实际上,可以肯定地说,在任何真实的山东威力500吨二合一辅助动力控制器液压机反馈控制系统中,误差永远不会变为零,除非是稍纵即逝的时刻。
但是让我们通过观察两个山东威力500吨二合一辅助动力控制器液压机电液系统并将它们进行比较来回顾原理,看看如何处理错误。然后,我们将看到我们可以应对它们的含义和方法。
图2.电液位置伺服机构代表了运动控制问题的最终解决方案。
第一个系统是山东威力500吨二合一辅助动力控制器液压机电液位置伺服机构,如图2中的简化示意图所示。注意从气缸杆到反馈传感器的线路。它是一个坚固的机械联动装置,表示反馈传感器正在测量气缸杆的实际位置。
换能器可以是线性可变差动变压器(LVDT),电位计或常用的磁致伸缩型。现在唯一重要的一点是,它产生的信号可以直接衡量实际的活塞杆位置。输出(反馈信号)是与活塞位置成比例的电压。例如,输出可以是例如0V,活塞缩回,例如,当完全伸展时,输出为10V。反馈传感器的增益系数以V / in。,V / mm等测量。这意味着如果我们知道电压,我们就可以推断出气缸的位置。反馈信号被送入比较器 - 这是X内部的小圆圈。
比较器
的作用比较器执行数学函数,从位置命令信号中减去反馈信号,该信号被馈送到比较器的另一个输入端。比较器的输出是误差信号,直接进入放大器。放大器的功能是将误差电压提升到更高的值,同时将误差电压信号转换为误差电流。误差电压可能只有几毫伏。但是,山东威力500吨二合一辅助动力控制器液压机伺服或比例阀可能需要伏特和安培。放大器将提供增强。同时,放大的误差信号(图2中标记为电流)被馈入伺服或比例阀。
以下是简化形式的系统解释:假设位置指令电压和反馈电压完全相同。这要求误差电压为零。如果误差电压为零,则放大器输出电流为零。如果流入比例/伺服阀的电流为零,则其阀芯将居中,活塞杆将不会移动。
另一方面,如果指令电压升高,例如1 V,并且气缸尚未移动,则命令和反馈将不相等,误差将不为零,并且阀门的电流将不会零。阀门的阀芯将偏离中心(零),将流体引导至气缸,气缸将移动。
这引出了一个问题,“活塞将移动多远?”我们可以概括地回答这个问题。假设山东威力500吨二合一辅助动力控制器液压机液压管道与电流的代数符号(正或负)一致,则气缸将沿增加反馈传感器输出电压的方向移动。随着气缸移动,可能延伸,反馈传感器输出增加。当它增加1 V时,命令和反馈电压将再次相等。阀门电流为零,阀芯居中,气缸停止。
静止和相等
在这种情况下的关键观察是当气缸停止时命令和反馈相等。现在考虑一组简单的值作为示例。假设一个气缸的行程为10.000英寸。与此相关的是位置传感器,每英寸活塞行程产生1.000 V输出,0.000-v位置与完全缩回一致。如果我们输入3.725 V的指令电压,当气缸最终停止移动时,气缸的位置是多少?如果你回答了3.725英寸,你就是对的。然而,这是一个理想化和过于简化的解释。
在实际系统中,电压不会相等,因为气缸由于活塞上的力不平衡而停止 - 活塞帽端的面积大于杆端的面积。阀门的压力增益特性决定了确切的停止条件。压力增益及其与非对称气缸的相互作用超出了本讨论的范围,在任何精密运动控制系统中都必须考虑到它们。
但是,为了简洁起见,我们将继续使用过于简化的方案。所以现在考虑所描述的系统将产生一个反馈信号,该信号在汽缸停止时名义上等于命令。名义上,在稳定状态下错误为零,这是一种令人愉快的事态。它是一个零误差系统,在稳定状态下命令和反馈相等。如果它们不相等,则阀门移动并且气缸移动。
指令电压所需的范围与反馈传感器的范围完全相同。但这引出了另一个问题:“是否存在反馈控制系统,其中命令和反馈信号在稳态下不相等,即使在所谓的名义基础上?”答案是肯定的!
图3.在电机速度控制反馈回路中,连续旋转电机取代了气缸,反馈传感器是转速计。
考虑图3的山东威力500吨二合一辅助动力控制器液压机电机速度控制回路。我们有一个伺服或比例阀,一个伺服或比例放大器,以及一个恒压功率单元。这与位置伺服机构的情况一样。然而,输出致动器是连续旋转马达,反馈传感器是旋转转速计。该电路是速度控制回路。
考虑一个数值例子。假设我们有一个转速计,其增益系数为每1000转每分钟1伏。这意味着如果电机以3000转/分的转速转动转速表,我们可以预期转速表输出为3.000 V.现在,以3000转/分钟运转电机所需的指令电压值是多少?如果你回答3.000 V,你就错了。这将需要更多,因为在该系统中必须存在严重错误,以使电机均匀地以任何速度旋转。换句话说,3.000V的命令将产生基本上小于3000rpm的速度。此外,我们没有足够的信息来计算所需的电压或产生的速度!我们需要知道伺服放大器的增益,单位为安培/伏特,阀门的增益,单位为每分钟gpm,
你必须知道收益
找到这些值是一项繁琐的工作,我们将回到它们,至少以简化的形式。同时,考虑刚刚提出的陈述背后的逻辑。假设我们输入了3.000 V的命令,然后认为速度是3000 rpm。这意味着转速计输出电压必须为3.000 V.这反过来要求误差电压为0 V.但如果误差电压为零,则放大器输出电流必须为零,然后阀芯必须居中。因此,电机必须以0 rpm转动!
但我们开始假设它转速为3000转,当我们跟着循环时,我们得出结论它必须零速!当零等于3000时,我们的假设是正确的。但是,唉,零不等于3000,除非是政治家手中。
在山东威力500吨二合一辅助动力控制器液压机速度控制回路中实际发生的是,例如,使用3.000 V的命令信号,电机的实际速度将介于0到3000 rpm之间,并且控制回路将找到一个均衡点,其中误差电压产生恰好足够的电流,使阀门移动恰当的量,以便产生足够的流量到电机,以保持电机以一定的速度转动。它不会为零,也不会是3000转。它将是介于两者之间的一些价值,并且控制循环找到最佳点,很少或没有麻烦。我们目前的问题是我们无法确定速度是多少,因为我们不知道电液部件的收益。
回到命令电压
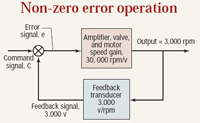
现在我们将看看确定实际的命令电压,但有更完整的信息。问题将以这种方式提出:“如果电机必须以3000转/分转速,如果山东威力500吨二合一辅助动力控制器液压机电液系统的速度增益为30,000转/ 分,那么命令信号必须是什么?”
图4.比例速度控制环路以标称的非零误差信号运行。
速度增益是一个组合增益,包括放大器,阀门和电机。它还必须在某种程度上包括动力单元压力和电动机上的负载转矩。这是一个非常方便的价值,但它绝不会减轻从那些几个组成部分的机器零件中找到它的乏味。经验只是说,如果我们要知道所有这些参数,组合速度增益的值为30,000 rpm / v是合理的。问题在图4中设置。
这样看:如果我们希望电机以3000 rpm转动,放大器输入必须小30,000或0.100 V.放大器输入是误差电压,因此指令电压必须比反馈大0.100 V 。当然,在3000转/分时,反馈电压必须为3.000 V.因此,我们得出结论,产生3000转/分的输出需要3.100 V的命令。
山东威力500吨二合一辅助动力控制器液压机分离位置伺服和速度控制回路的基本控制系统原理是双重的:首先,电子控制模块(放大器)是一个简单的比例控制。它本身不能将速度环中的误差减小到零。其次,我们在位置环中使用位置传感器,在速度环中使用速度传感器。位置传感器在回路中有一个集成,而速度传感器则没有,并且它是在稳态下将标称误差驱动为零的积分器。
速度环中没有积分器,它带来了另一个重要的控制系统原理:如果PID放大器(PID控制器,或者更简单地说,积分控制)是速度环,则标称稳态误差为零。用过的。这样的移动会在循环中放置一个人工积分器,当然,名义上说,3.000 V的命令将产生3000 rpm和零误差。







